Les collectifs de microrobots présentent des modèles de mouvement polyvalents
Un modèle pour de futures applications biomédicales et environnementales
Les comportements collectifs et les modèles d'essaims se retrouvent partout dans la nature. Les robots peuvent également être programmés pour agir en essaim.
Les collectifs de microrobots présentent des modèles de mouvement polyvalents
MPI für Intelligente Systeme
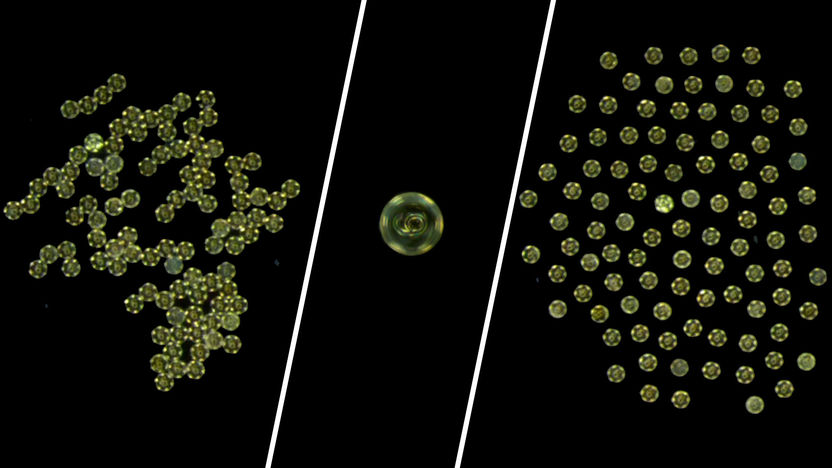
Des chercheurs du Max Planck Institute for Intelligent Systems (MPI-IS), de l'université Cornell et de l'université Jiao Tong de Shanghai ont mis au point des collectifs de microrobots qui peuvent se déplacer dans n'importe quelle formation souhaitée. Les particules miniatures sont capables de reconfigurer leur comportement en essaim rapidement et de manière robuste. Flottant à la surface de l'eau, les disques microrobotiques polyvalents peuvent tourner en rond, danser le boogie, se regrouper, se répandre comme un gaz ou former une ligne droite comme des perles sur un fil.
Chaque robot est légèrement plus grand que la largeur d'un cheveu. Ils sont imprimés en 3D à l'aide d'un polymère, puis recouverts d'une fine couche de cobalt. Grâce à ce métal, les microrobots deviennent des aimants miniatures. Pendant ce temps, des bobines de fil qui créent un champ magnétique lorsque l'électricité les traverse entourent le dispositif. Le champ magnétique permet de diriger avec précision les particules autour d'un bassin d'eau d'un centimètre de large. Lorsqu'elles forment une ligne, par exemple, les chercheurs peuvent déplacer les robots de manière à ce qu'ils "écrivent" des lettres dans l'eau. Le projet de recherche de Gaurav Gardi et du professeur Metin Sitti du MPI-IS, de Steven Ceron et du professeur Kirstin Petersen de l'université Cornell et du professeur Wendong Wang de l'université Jiao Tong de Shanghai, intitulé "Microrobot Collectives with Reconfigurable Morphologies, Behaviors, and Functions", a été publié dans Nature Communications le 26 avril 2022.
Le comportement collectif émerge des interactions entre les robots.
Les comportements collectifs et les modèles d'essaims se retrouvent partout dans la nature. Une volée d'oiseaux présente un comportement d'essaim, tout comme un banc de poissons. Les robots peuvent également être programmés pour agir en essaims - et on les a vus le faire de manière assez évidente. Une société de technologie a récemment présenté un spectacle de lumière par drone qui lui a valu un record mondial Guinness : plusieurs centaines de drones ont été programmés et ont volé côte à côte, créant des motifs étonnants dans le ciel nocturne. Chaque drone de cet essaim était équipé d'une puissance de calcul qui le dirigeait dans toutes les directions possibles. Mais que se passe-t-il si la particule unique est si minuscule que le calcul n'est pas envisageable ? Lorsqu'un robot ne fait que 300 micromètres de large, on ne peut pas le programmer avec un algorithme.
Trois forces différentes sont en jeu pour compenser l'absence de calcul. La première est la force magnétique. Deux aimants de pôles opposés s'attirent. Deux pôles identiques se repoussent. La deuxième force est l'environnement fluide, l'eau qui entoure les disques. Lorsque des particules nagent dans un tourbillon d'eau, elles déplacent l'eau et affectent les autres particules environnantes du système. La vitesse du tourbillon et son ampleur déterminent la manière dont les particules interagissent. Troisièmement, si deux particules flottent l'une à côté de l'autre, elles ont tendance à dériver l'une vers l'autre : elles courbent la surface de l'eau de telle sorte qu'elles se rapprochent lentement. Les scientifiques et les amateurs de céréales appellent cela l'effet "cheerio" : si vous laissez deux cheerios flotter sur du lait, ils ne tarderont pas à se heurter l'un à l'autre. À l'inverse, cet effet peut aussi faire en sorte que deux choses se repoussent (essayez une épingle à cheveux et un cheerio).
Trois forces permettent la reconfiguration
Les scientifiques utilisent les trois forces pour créer un modèle de mouvement coordonné et collectif pour plusieurs douzaines de microrobots en un seul système. Une vidéo montre comment les scientifiques dirigent les robots à travers un parcours, en affichant la formation qui convient le mieux à la course d'obstacles. Par exemple, lorsqu'ils entrent dans un passage étroit, les microrobots s'alignent en file indienne et se dispersent à nouveau à la sortie. Les scientifiques peuvent également faire danser les robots, seuls ou en couple. En outre, ils montrent comment ils placent une minuscule balle en plastique dans le récipient d'eau, puis regroupent les robots en un amas pour pousser la balle flottante. Ils peuvent placer les minuscules particules à l'intérieur de deux engrenages et déplacer les particules de manière à faire tourner les deux engrenages. Un modèle plus ordonné est également possible, chaque particule gardant une distance identique à sa voisine. Tous ces différents modes et formations de locomotion sont obtenus par un calcul externe : un algorithme est programmé pour créer un champ magnétique rotatif ou oscillant qui déclenche le mouvement et la reconfiguration souhaités.
"Selon la façon dont nous modifions les champs magnétiques, les disques se comportent de manière différente. Nous accordons une force, puis une autre, jusqu'à ce que nous obtenions le mouvement souhaité. Si nous faisons tourner le champ magnétique à l'intérieur des bobines trop vigoureusement, la force qui fait bouger l'eau est trop forte et les disques s'éloignent les uns des autres. Si nous tournons trop lentement, l'effet de cheerio qui attire les particules est trop fort. Nous devons trouver l'équilibre entre les trois", explique Gaurav Gardi. Il est doctorant au département d'intelligence physique du MPI-IS et l'un des deux principaux auteurs de la publication avec Steven Ceron de l'université Cornell.
Un modèle pour les futures applications biomédicales et environnementales
Le scénario futur pour ces collectifs microrobotiques est d'être encore plus petits. "Notre vision est de développer un système encore plus petit, composé de particules d'un micromètre seulement. Ces collectifs pourraient potentiellement entrer dans le corps humain et naviguer dans des environnements complexes pour administrer des médicaments, par exemple, pour bloquer ou débloquer des passages, ou pour stimuler une zone difficile à atteindre", explique M. Gardi.
"Les collectifs de robots présentant des transitions robustes entre les comportements de locomotion sont très rares. Pourtant, de tels systèmes polyvalents sont avantageux pour opérer dans des environnements complexes. Nous sommes très heureux d'avoir réussi à développer un tel collectif robuste et reconfigurable à la demande. Nous considérons notre recherche comme un modèle pour de futures applications biomédicales, des traitements peu invasifs ou des mesures correctives environnementales", ajoute Metin Sitti, qui dirige le département d'intelligence physique et est un pionnier dans le domaine de la robotique à petite échelle et de l'intelligence physique.
Note: Cet article a été traduit à l'aide d'un système informatique sans intervention humaine. LUMITOS propose ces traductions automatiques pour présenter un plus large éventail d'actualités. Comme cet article a été traduit avec traduction automatique, il est possible qu'il contienne des erreurs de vocabulaire, de syntaxe ou de grammaire. L'article original dans Anglais peut être trouvé ici.
Publication originale
Autres actualités du département science